
Ahoj piloti! Dnes vám ukážeme, jak si správně naladit svůj FPV dron v Betaflight Configutatoru. Co si nastavit, abychom mohli začít ladit dron? Jak se ladí a jaké by měly být výsledky ladění? Není to sice procházka růžovou zahradou, ale jakmile pochopíš, můžeš se považovat za FPV mistra.
Upozornění: Tento článek je jen pro silné povahy! Vyskytují se zde termíny a je třeba se hodně soustředit. Doporučujeme vše dělat postupně společně se čtením článku, protože se jedná o konkrétní postup v Betaflight Configuratoru.
Připraven/a? Jdeme na to!
Co je to PID controller?
Rozdíl mezi výchylkou (setpoint) a hodnotou, kterou naměří gyro (úhlová rychlost), nazýváme chyba. Chyba je základní vstupní veličinou PID controlleru. Ale co je to ten PID controller a co dělá?
PID controller je algoritmus, který se snaží vypočítat, jak na chybu nejlépe zareagovat tak, aby se vynulovala - tedy aby úhlová rychlost (rychlost otáčení koptéry) byla přesně taková, jakou pilot zadá výchylkou páky na vysílačce.
Co znamenají jednotlivá písmena PID?
PID controller používá 3 základní hodnoty, které se označují P, I a D.
- Hodnota P udává, jakou silou se reaguje na velikost chyby, respektive na velikost rozdílu mezi tím, co si pilot přeje a co koptéra dělá.
- Hodnota I reaguje na to, jak dlouho daná chyba existuje. Tzn. čím déle máme rozdíl mezi tím, co pilot chce a co dron dělá, tím větší silou bude působit složka I.
- Hodnota D funguje v podstatě jako výhled do velmi blízké budoucnosti. Složka D tedy reaguje na to, jestli se chyba v blízké budoucnosti bude zmenšovat nebo zvětšovat. Na základě toho pak reakci PID controlleru akceleruje nebo brzdí.
Tip: Správně naladěný dron tě bude poslouchat při jakýchkoliv freestyle tricích. Neváhej si přečíst náš článek Top freestyle triky s FPV dronem!
Jak naladit FPV dron v Betaflightu
Ze všeho nejdříve potřebujeme několik programů - Betaflight Configurator, Betaflight Lua Script a PID Tool Box.
Odkazy ke stažení programů:
PID lazení v tomto návodu se bude zaměřovat na 5'' FPV freestyle dron s Blackboxem. Menší drony budou mít nastavení filtrů posunuté do vyšších frekvencí a větší drony naopak do nižších.
První konfigurace
CLI
Jako první si uděláme zálohu! A to tak, že si připojíme dron k PC a v Betaflight konfigurátoru v záložce CLI zadáme diff all. Vyjede nám veškerá konfigurace, kterou jsme na dronu změnili od defaultu. Uložíme tlačítkem save to file.
Configuration
Pro PID tuning chceme co největší PID loop frekvenci. Takže vybereme pro řídicí desku s F7 čipem tu nejvyšší frekvenci. Pro řídicí jednotku F4 alespoň 3,2 kHz pro gyroskop BMI, pro MCU 4 kHz. Pro starší desky, jako je F4, by mohl nastat problém s výkonem čipu.
Presets
Je potřeba si správně vybrat preset pro tvůj RC systém a frekvenci. Takže například ELRS 500 Hz.
Motors
Pro F7 FC (flight controller) můžeš vybrat DSHOT600, pro F4 bude lepší DSHOT300. Musíme zprovoznit Bidirectional Dshot. Pokud nefunguje a po roztočení motorů se neukazuje RPM (rounds per minute) motorů, tak si zkus updatovat firmware na ESC.
PID Tuning
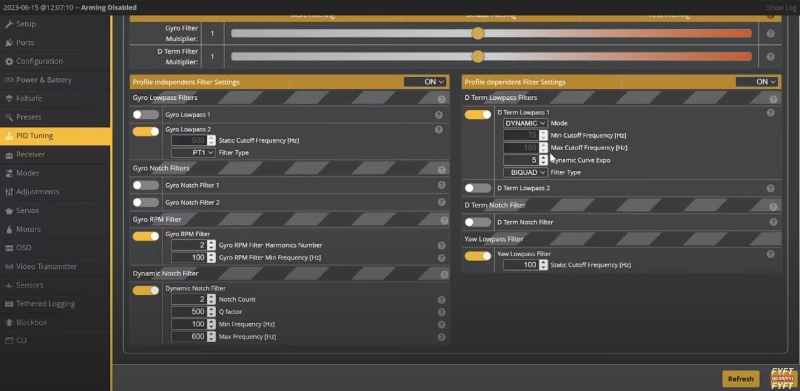
V záložce Filter Settings si zapni akorát několik filtrů. Gyro Lowpass 2 od 500 Hz s typem filtru PT1. Gyro RPM Filter s minimálně 2 Gyro RPM Filter Harmonic Number. Dynamic Notch Filter s minimálně 2 Notch Count. Dále ve filtrech pro Dterm si zapneme D Term Lowpass 1 v rozmezí 75-150 Hz (v závislosti na velikosti a konkrétním rámu) a s typem filtru BIQUAD. Poslední filtr si necháme zaplý Yaw Lowpass Filter.
Tip: Nevíš, kde létat s dronem? Přečti si náš článek Pravidla pro létání s dronem.
Blackbox (aneb černá skříňka)
Potřebuješ si nastavit Blackbox logging rate na alespoň 1/2 a Blackbox debug mode na GYRO_SCALED. Poté už jen Save and reboot a Erase flash.
První testovací let po konfiguraci
Ujisti se, že je dron mechanicky v pořádku. Že nemá žádné povolené nebo chybějící šrouby, že nechybí kus vrtule a podobně. Pokud létáš s HD kamerou, pořádně ji upevni na dron. Zkrátka si uprav dron tak, jak s ním létáš nejčastěji.
Tento testovací let klidně proveď v Angle modu - cílem je plynule přidávat a ubírat plyn. Ne vždy se podaří měnit plyn naprosto plynule, ale to nevadí. Po zalétání přibližně 30 s připoj dron k počítači a v záložce Blackbox si stáhni data ideálně přes Active mass storage (lze i přes Save flash to file). U druhé možnosti není zaručeno, že nenastane chyba při ukládání, ale nám se ještě nestala. I tak dej přednost první možnosti.
Vyhodnocení filtrace
Na vyhodnocení filtrace budeš potřebovat program PIDtoolbox. V něm si pomocí tlačítka Select otevři právě stažená data. Tlačítkem Spectral Analyzer se dostaneš do dalšího okna, kde nám program po stisknutí Run ukáže obsazení frekvencí celkově a zpoždění filtrace. Zpoždění (delay) se snaž snížit co nejvíc, aby dron reagoval na vibrace včas. Snaž se tedy zpoždění stáhnout na přibližně 2 ms (velmi hrubý odhad, záleží na konkrétním stroji). Pokud by bylo zpoždění například na 7 ms, už musíš ubrat zatížení řídicí desky a ubrat počet a náročnost filtrů.
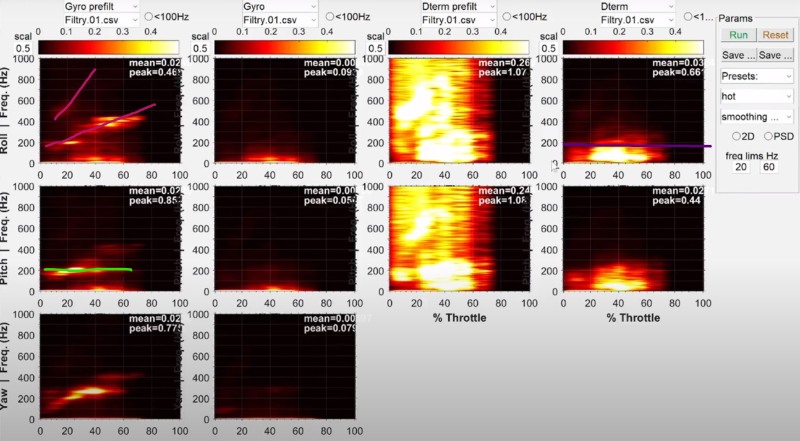
Co se týče grafů intenzity vibrací na frekvenci - dron dokáže reagovat na změny přibližně do 120 Hz . Při vyšších frekvenčních hodnotách už dron pouze generuje teplo v motorech. Proto se snaž dostat vyšší frekvence alespoň pod -20 dB, ale čím méně, tím lépe.
Z grafu se však nedozvíš, co by mohlo pomoci proti vibracím - to se dozvíš až po stisknutí Freq x Throttle a následně opět Run. Grafy, které se ti objeví, se nazývají Heat mapy. Jsou to 3D grafy, které mají nejen X a Y osu, ale pomocí barvy ukazují další osu hodnot. Čím tmavší, tím méně vibrací.
Grafy ti ukáží, při jakém plynu máš konkrétní vibrace. Pokud se frekvence zvyšuje s plynem, jedná se o vibrace od motorů. Takových linií v grafu může být více. Stačí je ale spočítat a příslušné číslo nastavit do RPM filtru v nastavení filtrů. Pak se v grafu může vyskytnout i horizontální linie, to bude s největší pravděpodobností rezonance rámu. Ta se s frekvencí nemění a cílí na ni Dynamic notch filter a Dterm Lowpass filter.
Pokud se vibrace přenesou z prvního do druhého sloupce, přidáš filtraci gyra. Pokud z třetího do čtvrtého sloupce, upravíš Dterm filtraci. Když něco upravuješ, ber položky po jedné, zkontroluj si nastavení dalším letem a celý proces opakuj, dokud nejsi spokojený/á.
Nalezení PID hodnot
Teď připravíš dron na hledání hodnot PID. Zajdi do záložky PID tuning a nastav slidery (posuvníky) na hodnoty, které jsou v tabulce.
| Damping | 0.3 |
| Tracking | 0.8 |
| Stick Responce | 0.0 |
| Dynamic Damping | 0.0 |
| Drift - Wobble | 0.0 |
| Master | 1.0 |
První polovinu hledání správných hodnot PID můžeš létat v Angle modu. Ideálně si ještě nastav Angle Strenght na 100. Během letu dělej rychlé náklony ze strany na stranu do obou směrů. Po každém letu si změň hodnotu D gain slideru třeba o 0,2. Tu můžeš udělat buď v Betaflight konfigurátoru, Betaflight Lua scriptu nebo v OSD menu.
Během letu si všímej, jestli nezačíná zvuk motorů výrazně chrčet. Stejně tak pozoruj, zda motory budou po letu teplé. To znamená, že ses s D gain dostal/a už dost vysoko.
Tip: Zjisti, jak přesně fungují motory, v našem článku Vše o motorech FPV dronů!
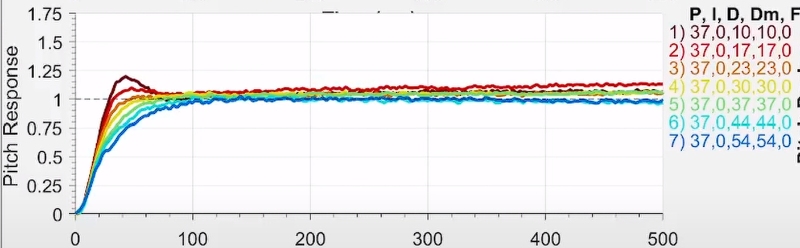
Po skončení série letů opět stáhni Blackbox data a otevři je v PIDtollbox. Nyní se ale musíš dostat do Step Resp Tool. Tam se pro každou osu zvlášť ukáží křivky odezvy dronu na výchylku pro jednotlivé lety. Budou pravděpodobně začínat přemrštěním přes hodnotu 1. To znamená, že nebyl dost vysoký parametr D. Postupně se závislosti budou narovnávat - ty hledáš tu, která akorát dojde co nejrychleji k hodnotě 1 a nepřejde ji. Právě ta hodnota je tou nejlepší pozicí D oproti P. Můžou se lišit jednotlivé osy. Doporučujeme yaw osu nechat tak, jak byla nastavena v Defaultu a poměr Pitch a Roll se dá upravit slidery Pitch Damping a Pitch Tracking.
Po nalezení správného poměru PD je načase najít ten nejlepší výkon z PID smyčky. To nám zajistí zvednutí Master Multiplier. Ladí se stejnými pohyby jako PD. Hledáme takovou křivku, která se dostane nejrychleji na hodnotu 1 a je poslední, která se ještě mění.
Posledním krokem je zvednutí hodnoty I gain slideru na 1.0 a hledání hodnoty FF gain. Tato komponenta se již nedá ladit v Angle modu - musí se ladit v Acro modu.
Při letu potřebuješ provést rychlý pohyb v Roll a Pitch ose. Opět postupně zvedej například po 0,3, než začne dron dělat problémy. Nyní po nahrání dat do PIDtoolboxu zůstaň na úvodní stránce a najdi si pro každý let onen ostrý pohyb. Následně změř rozdíl mezi Setpoint a Gyro daty pomocí tlačítka Period. To, co aktuálně hledáš, je nejkratší čas mezi Setpointem a Gyrem, který ještě nezpůsobuje překmity na konci nebo začátku pohybu. Právě to by měla být ideální hodnota.
FF gain je ale především o správném pocitu ovládání, a tedy se nemusíš řídit čistě blackboxem. Vyber si hlavně hodnotu, na které se ti dron ovládá nejpříjemněji.
Teď by tvůj vymazlený dron měl létat přesně podle tvých představ.
Doufáme, že ti tento návod poskytl užitečné informace a pomohl ti při ladění PID controlleru tvého FPV dronu. Nyní máš ve svých rukou možnost dosáhnout dokonalého letu a vychutnat si naplno radost z pilotování svého vlastního dronu. Bezpečný let a spoustu vzrušujících zážitků - tak ať to lítá! Doslova...
[Autor-David]